信息中心


開發新型智能中空納米機器人是當前最前沿的研究領域之一🤮,對精準醫療、傳感檢測等領域的發展至關重要👨🏿🏭。目前大多數中空納米機器人為不對稱開口結構,然而單一的開口會限製物質和能量的傳輸效率。因此📸,用多孔殼層替代單一開口是提高中空納米機器人性能的潛在途徑之一。
針對以上問題,沐鸣平台孔彪課題組開發動力學調控界面選擇性超組裝策略,成功構築具有選擇性中空結構的納米機器人,且其拓撲結構可以精準調控。此外🦸🏽♂️,該新型中空納米機器人可以實現貨物分子的可控裝載及卸載,在生物醫療等領域具有潛在應用。
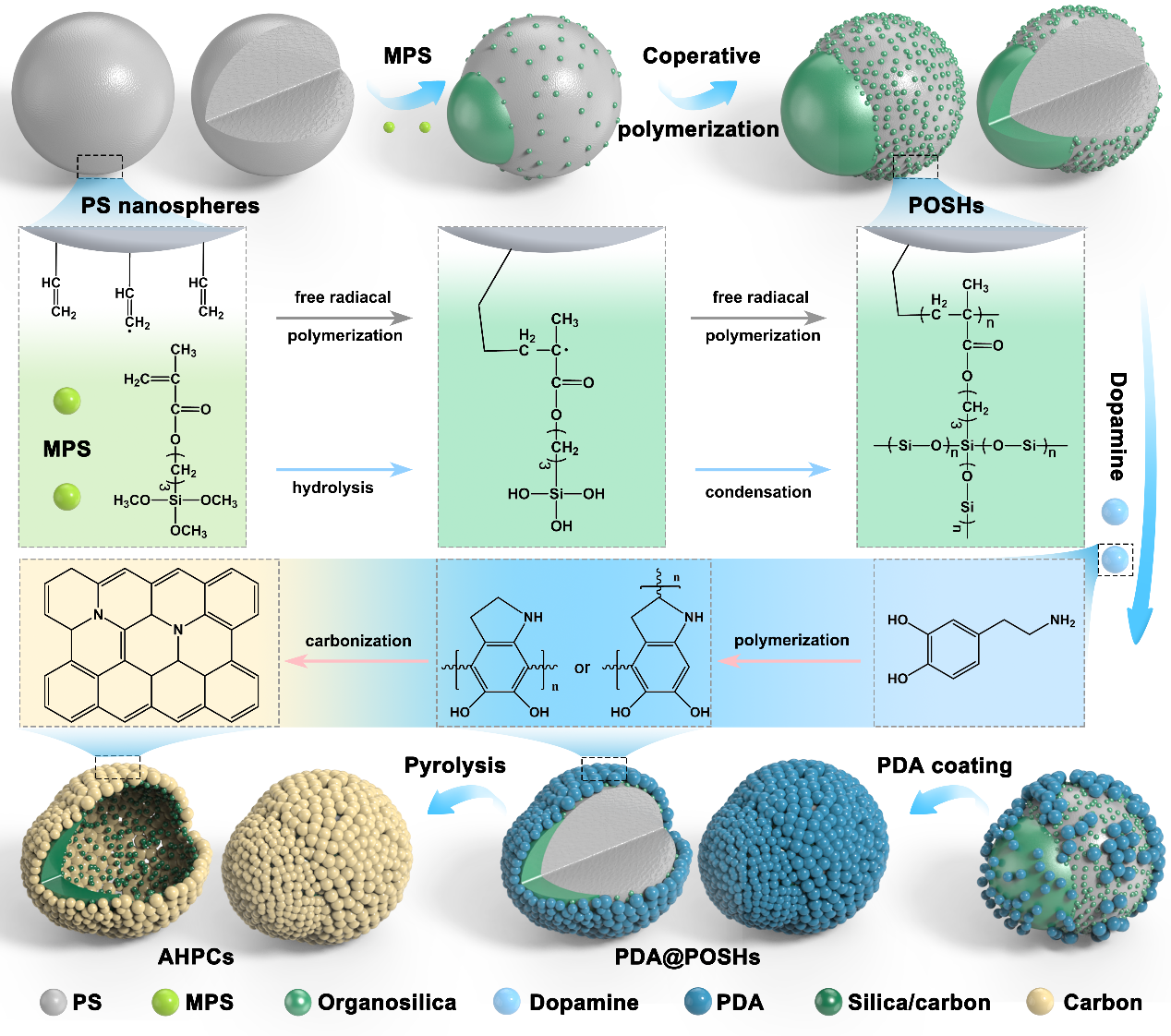
作者巧妙利用前驅體中同時發生的(烯基)自由基聚合反應和(三甲氧基矽烷)水解聚合反應,實現了有機矽在聚苯乙烯納米顆粒表面的選擇性島狀生長,隨後經過包裹聚多巴胺及高溫煆燒得到具有選擇性中空結構的納米機器人。此外,通過精確調控兩種聚合反應的動力學🩹🤾🏽♂️,可以實現對島狀有機矽尺寸和數量等參數的精準調節,進而可以根據不同需求合成具有可調拓撲結構的多功能納米機器人。
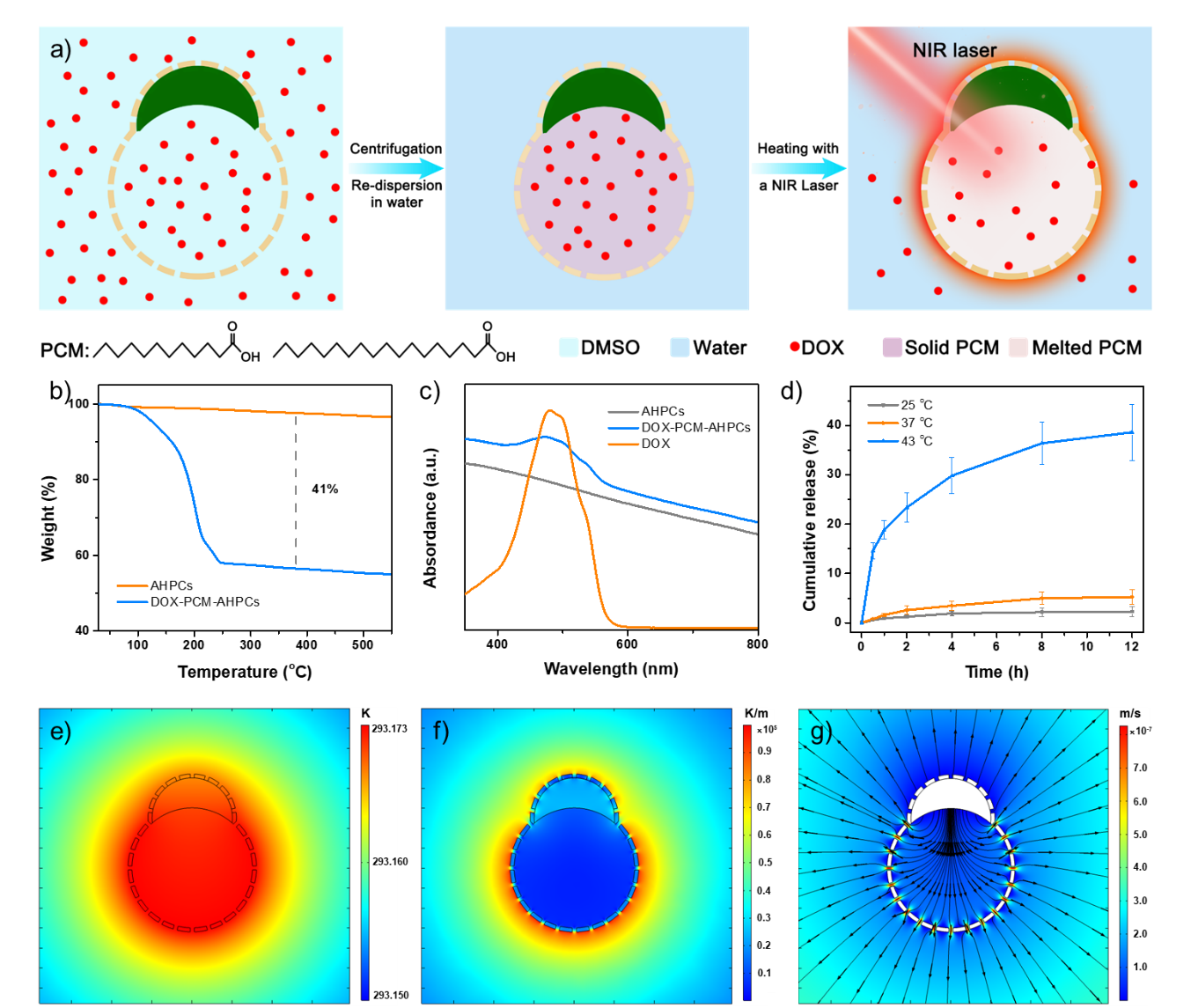
作者進一步充分利用其特殊中空結構及光熱性能,證明該中空納米機器人可以實現貨物分子的高效裝載及在近紅外光照射下的可控釋放。FEA模擬結果進一步證明了該中空納米機器人的中空限域裝載及卸載能力。在該工作中,孔彪研究員團隊開發了動力學調控界面選擇性超組裝策略,並基於該策略構築了一系列具有可調拓撲結構的中空納米機器人。該超組裝策略為設計開發新型多功能智能中空納米材料提供了一種簡便的方法。
相關研究工作日前以“Kinetics-Regulated Interfacial Selective Superassembly of Asymmetric Smart Nanovehicles with Tailored Topological Hollow Architectures”為題發表於化學旗艦期刊Angewandte Chemie International Edition上🍙,該研究得到了國家重點研發計劃、國家自然科學基金等項目的支持。
全文鏈接:https://onlinelibrary.wiley.com/doi/10.1002/anie.202200240


